





其他回答
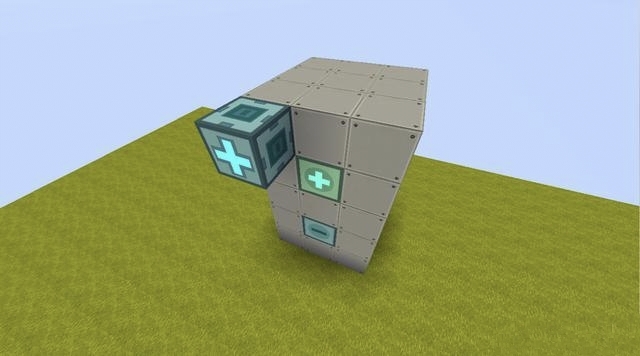
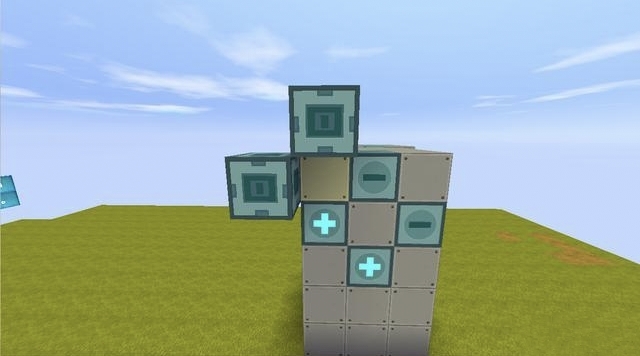
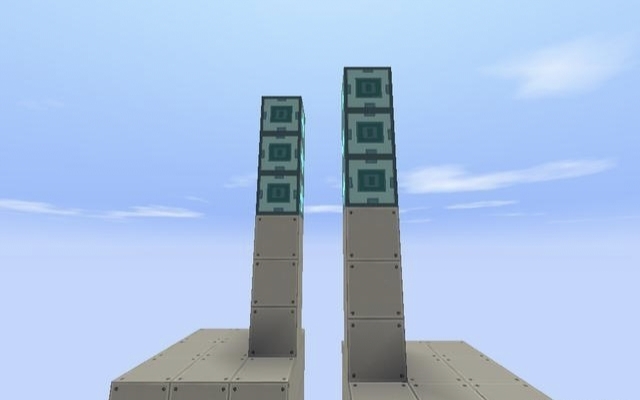
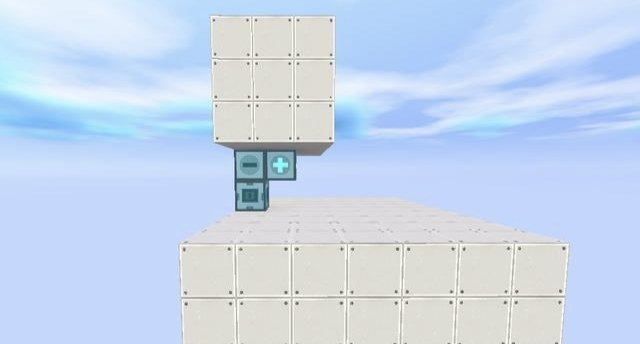
1、在地上放一个宽度均为3格,高为5格的立柱。(用于做机器人左脚)上边置放一个滑动方块,标识器( ),标识器(-)。如下图:
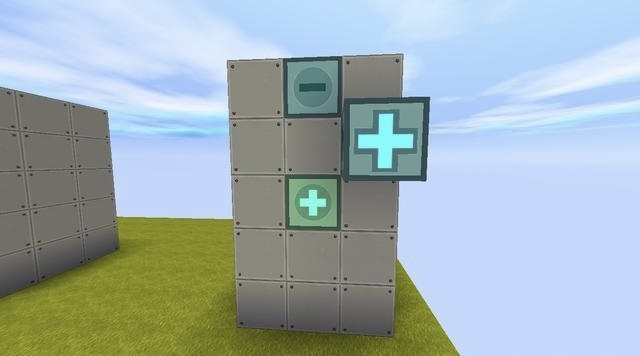
2、还要在滑动方块前放此外一根柱子。(智能机器人右脚)智能机器人右脚里侧图:
3、记牢图上标识器和滑动方块位置,假如弄错得话设备会出现异常。智能机器人左脚上滑动方块要靠着右脚的标识器(-)左脚标识器( )要与右脚滑动方块在同一排,且中间距一格。2个立柱之间的距离又为1格。(的内部滑动方块用于操纵脚部升高)
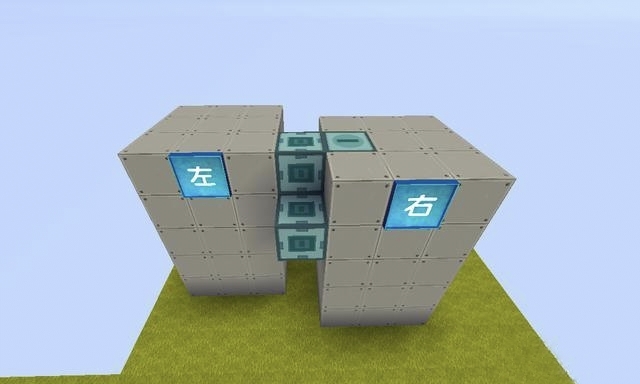
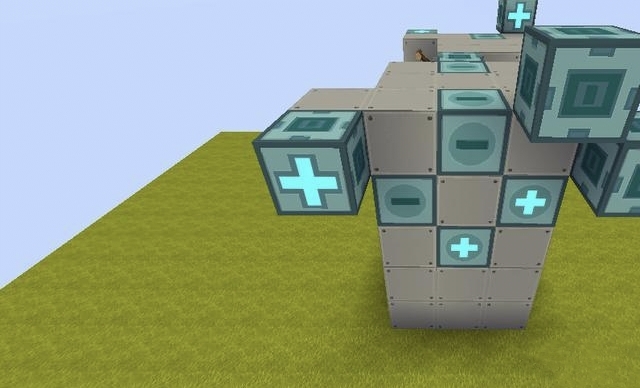
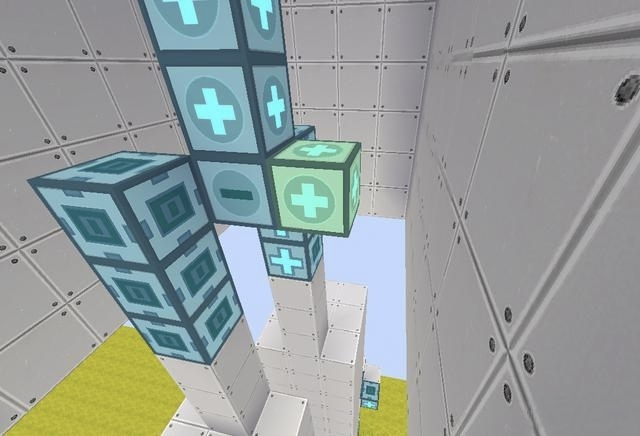
4、在两条腿的侧边还需要放入标识器。滑动方块插电之后吸引住 号面标识器( ),断电后吸引住标识器(-),能够拉动2个标识器间的格子挪动,全部智能机器人仅有左脚上一格滑动方块插电,其它的都是靠动格子关闭电源吸引住标识器(-)来健身运动。因此标识器(-)会向着标识器( )挪动,做到向前的目地,这儿往前是标识器( )放前,标识器(-)后面,往下时标识器( )再下,标识器(-)在上。倘若滑动方块插电则相反。(这儿滑动方块全是关闭电源的)在左脚上面上电源开关。(这也是操纵智能机器人运动的电源开关)
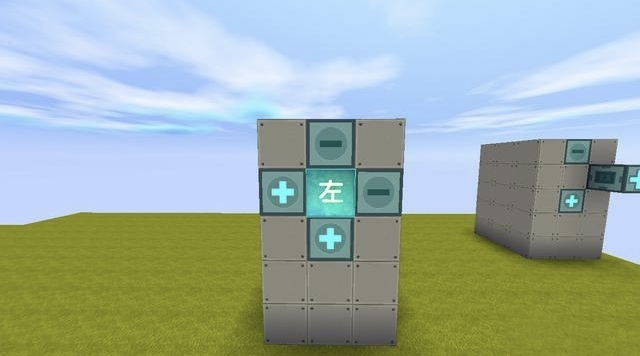
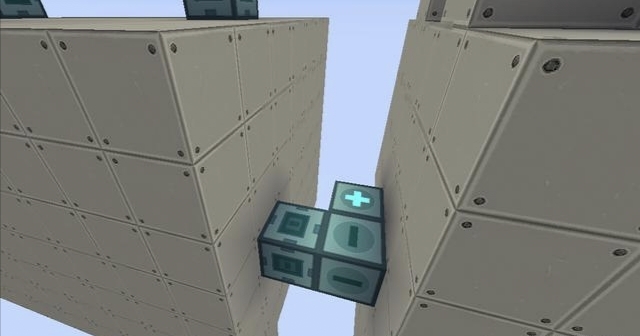
5、还要在腿的两侧放入2个滑动方块。(这俩滑动方块一个用于操纵脚部往前,另一个用于让腿落下来)
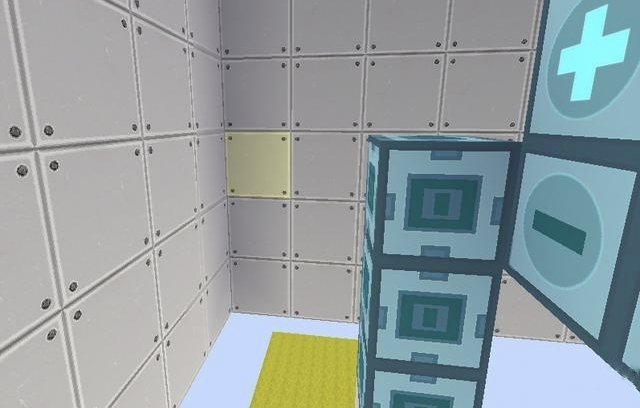
6、滑动方块也不能靠着机器人的脚部,且滑动方块 号都朝着里边。
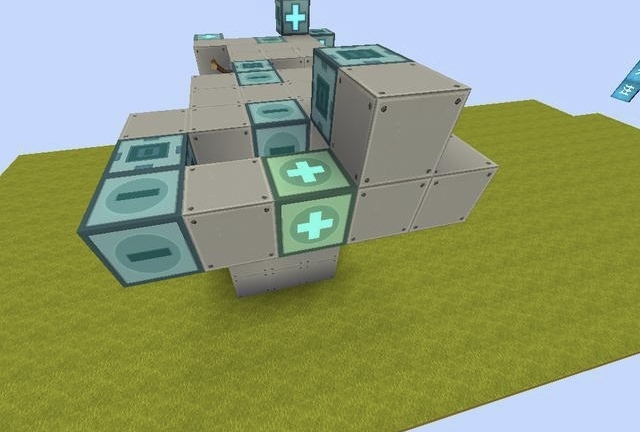
7、在腿再放一个格子用于联接滑动方块。滑动方块的 号对着外边。
8、将以上2个脚部两侧的滑动方块相互连接,还要在上面放2个标识器,标识器( )在前面,标识器(-)冲着滑动方块。
这一滑动方块操纵两侧两行滑动方块跟随脚部往前挪动。
9、左边也一样。脚部拼装进行。(带动电源开关运行)
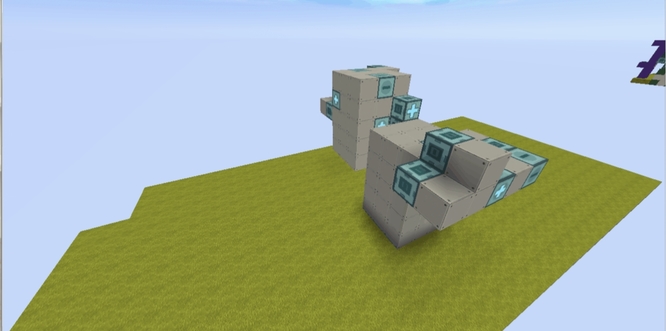
10、保障机械设备能够正常运作。
11、根据自身要求能够给机器人的脚部增加长度,上面都需要往脚部上边放3个格子和3个滑动方块。(滑动方块的 号仍然朝着里边)
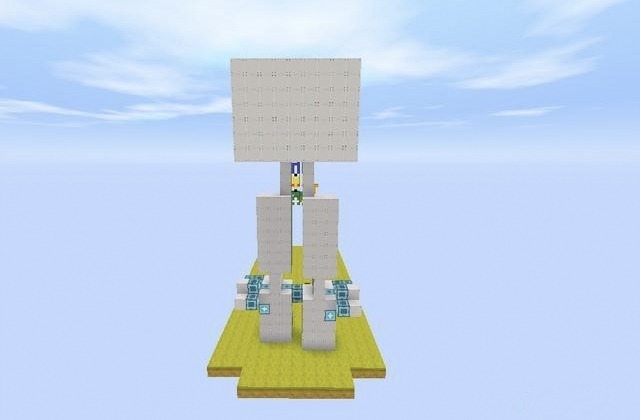
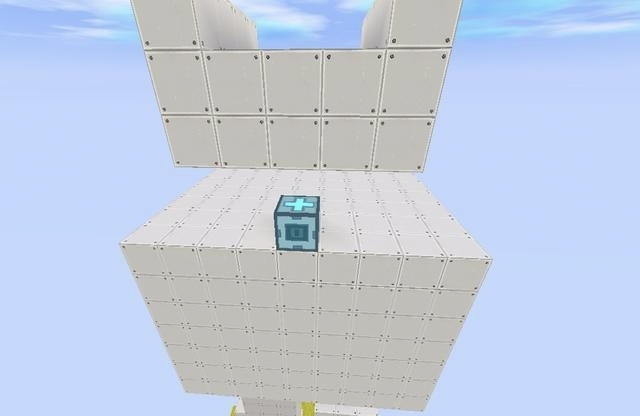
12、在左脚顶端滑动方块前放一个标识器(-)和四个标识器( )。(如下图)
13、以后就可以在标识器顶部把整个上半身做出来的。由于标识器较多推动256块格子,因此上身的格子不能超过256块。(我搞好归档里上身长为9格,宽和高均为7格)刚好可以推动。
14、身体内部与脚部前后的间距至少不少于一格。
15、上下间距至少不少于两行。
16、底端不能超过格子里的三个滑动方块。
摆好上身后就需要为机器人安装头部和胳膊了。(基本原理非常简单)在身体上选好一个部位放入滑动方块。(等同于设备人的脖子)滑动方块 号朝着上边。
17、在滑动方块上边放标识器(-),标识器(-)的前方放标识器( )。
18、由于设备人的头部和胳膊都是靠上体先往前随后带动的。这儿滑动方块会跟着上体往前挪动后,移位之后移到到标识器( )下边,滑动方块会吸引住标识器(-),标识器(-)会推动头顶部一起挪动,那样头顶部便会往前渐渐地挪动。可以这么说全部智能机器人就是靠脚部来推动。
19、胳膊的相接处基本原理与头顶部同样。
20、实体模型搞好后就可以沾染自身喜欢的颜色。实体模型还可以根据自己的需求来拼装。做这个智能机器人我一共使用了滑动方块21块,标识器(-)16块,标识器( )19块。
